
Smart Tip for Gait Functional Diagnosis in Multiple Sclerosis Patients (DPI2017-82694-R)
- Lead researchers: Asier Zubizarreta - (01/01/2018 - 31/07/2021)
- Funding body: Spanish Ministry of Science and Innovation
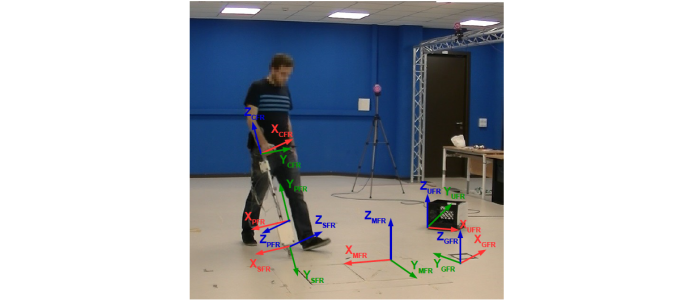
This project focuses on the development of an intelligent tip for the monitoring and diagnosis of Multiple Sclerosis (MS) patients. The data adquired by this device is intended to be used for diagnosis purposes, offering objective data that can be used to optimize and adapt the rehabilitation therapy to the particular state of each patient, which will lead to the improvement of his/her life quality. MS is one of the neurological diseases with more impact in society (40000 patients in Spain), due to: 1) the average...
Read more