The Project
-

Universal Haptic Pantograph (UHP) rehabilittaion robot
-

Universal Haptic Pantograph (UHP) rehabilittaion robot
-
Control of UHP rehabilittaion robot
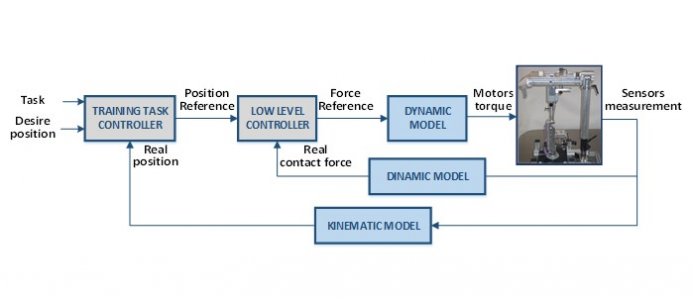
Control of Universal Haptic Pantograph (UHP) rehabilitation robot
- Lead Researchers: Asier Zubizarreta - (01/09/2013 - 31/12/2014)
- Research Area: Collaborative and intelligent Robotics
- Funding Body: Euskampus Fundazioa, Neurosciences Area
Objectives
In the last few decades, robotic devices have been proposed as an alternative to traditional rehabilitation procedures. Longer treatments, repeatability, adaptability, cost-effectiveness and the possibility to analyze the patient progress, are some of their benefits. One of the most important issues in rehabilitation robotics is the design of control approaches for proper and safe user interaction. Thus, the aim of the project is to design and implement a suitable advanced control structure for rehabilitation robots.
Achievements
Amongst the achievements of the project, we can highlight the following:
- Definition of a kinematic and dynamic modeling methodology for rehabilitation robots. The possession of a suitable model allows to know the behavior of the robot, facilitating the implementation of precise advanced controllers. In addition, these models are used as force and motion estimators, reducing the number of sensors.
- Design of an advanced control algorithm capable of control the interaction force and motion between the user and the robot. This way, gentle and robust motion are performed, increasing user safety.
- Design of optimal rehabilitation tasks with the ability to adapt to the recovery status of the patients. These rehabilitation tasks generate adequate force and motion references for the designed control algorithm.
- Implementation of the control algorithm and rehabilitation tasks in the Universal Haptic Pantograph (UHP) robot. This allows to validate the designed algorithms in a real rehabilitation robot.
Acknowledgements
Euskampus Fundazioa, Neurosciences Area and TECNALIA Research and Innovation, Health Division, Neurorehabilitation Area