

Real-time position-strengh control based on elastic models for high performance applications of parallel robots. Control de posición-fuerza en tiempo real basados en modelos elásticos para aplicaciones de alto rendimiento de los robots paralelos (DPI2012-32882)
- Lead Researchers: Itziar Cabanes Axpe - (01/01/2013 - 31/12/2016)
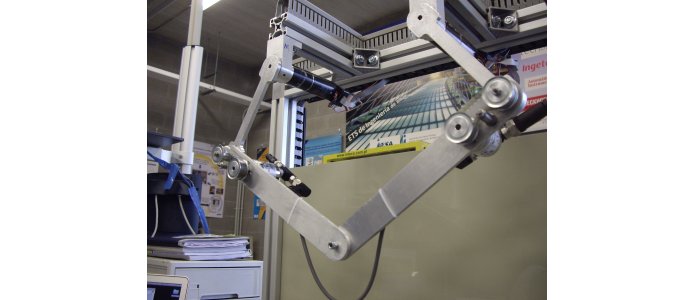
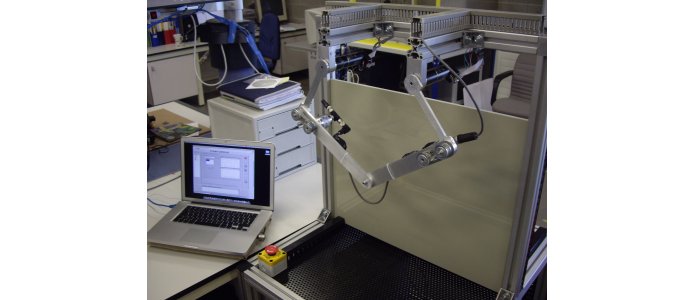
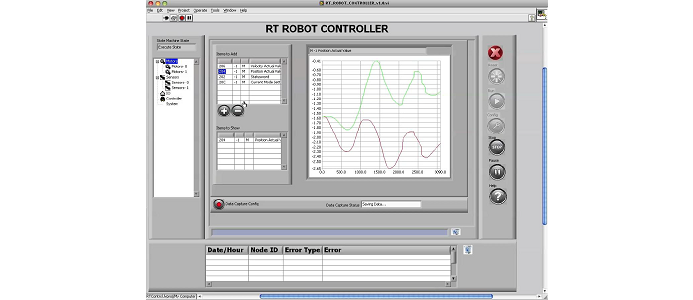
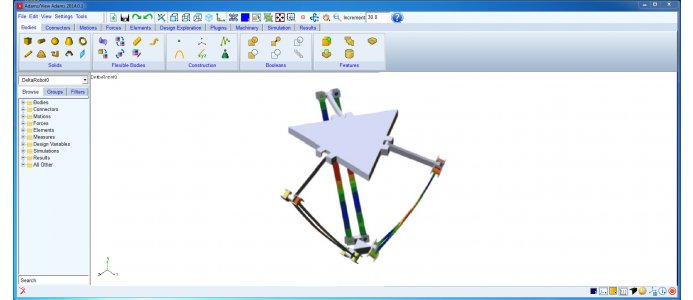
Parallel robots have proven to be the best alternative for dynamic high performance applications in which we need to manipulate powerful changes, apply controlled forces efficiently or move objects at high speed. For this, we require a correct mechanical design as well as an adequate controller that can be executed on real-time. Thus, the aim of the project is to develop specific control techniques for parallel robots in high dynamic performance applications.
Read more