The Project
-
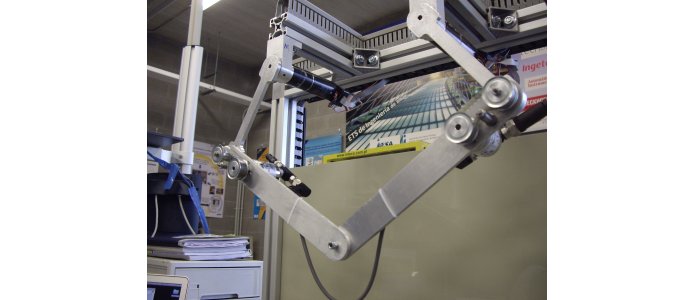
Prototype 5R with sensors in passive articulations
-
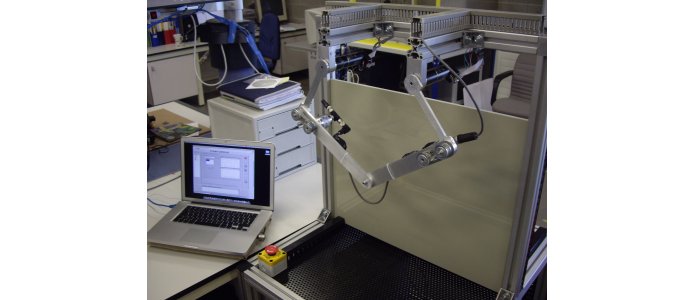
Host-target arquitecture in the 5R implementation
-
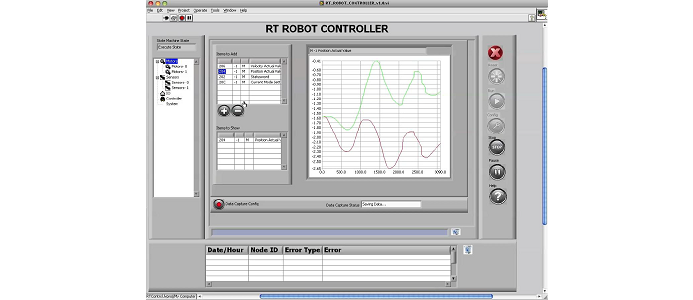
ValidBot
-

Controllers of linear motors
-

Linear motor
Control strategies based on a model with redundant information to improve performance. Estrategias de control basadas en modelo con información redundante para la mejora de las prestaciones (DPI2009-07669)
- Lead Researchers: Itziar Cabanes Axpe - (01/01/2010 - 31/12/2012)
- Research Area: Collaborative and intelligent Robotics
- Funding Body: Spanish Ministry of Science and Innovation
Objectives
The aim of this project is to develop control strategies specifically for closed chain robots, where, given their complex kinematics and dynamics and the high fitting between the different kinematic chains, the control systems used until now have been decoupled and taken from serial robots. For this, we sensors are incorporated into the passive articulations or not actuated (partially or wholly) so this additional information will be used in the control strategies.
Achievements
Amongst the achievements of the project, we can highlight the following:
- The facilitation of a simple tool to study the ideal number of passive sensors needed in the kinematic chains of these robots, along with their correct location. The approach of our research group, which uses the “adequate” passive sensors in pairs has been confirmed as an important advantage for the reduction of the computational cost of the direct kinematic problem and the increase in control precision. The study based on the analysis of the sensitivity is established as the most adequate tool with a lower computational cost to obtain the best configurations of redundant sensors. This tool is considered to be of great help during the design of any parallel robot.
- The establishment of a generic methodology, automatized and reconfigurable to obtain the dynamic model that is compact, structured and with redundant information.
- The development of model based advanced control strategies, adding information on the passive nodes to the actuated nodes. This improved the follow up of the end of the robot, both decreasing the positioning errors when following tracks in space, which is free of singularities, and increases robustness when facing uncertainties in the robot paremeters. Both the models developed and the control strategies proposed (Extended computed torque control, Robust predictive control for tracking or trajectory tracking, Extended Robust control, Iterative Learning Control, amongst others) have been validated with simulations as well as real prototypes.
- Using the experience of the group and aiming to evaluate the real-time extended control strategies, we have constructed an open and distributed prototype, which, has servo-controllers with the CANOpen interphase, including extra sensors in the passive unions of the robot. We have also created a fast prototyped environment, VALIDBOT (validation of control strategy for parallel robots) with Labview RT, which allows us to evaluate the selected control algorithms and to validate both experimentally and in real-time the conclusion obtained in the simulation.
Acknowledgements
Ministry of Science and Innovation
Software
Validbot