Advanced control of parallel robots for high performance applications in the automotive sector. Control avanzado de robots paralelos para aplicaciones de alto rendimiento en el sector de la automoción (S-PE11UN110)
- Lead Researchers: Asier Zubizarreta - (01/01/2011 - 31/12/2012)
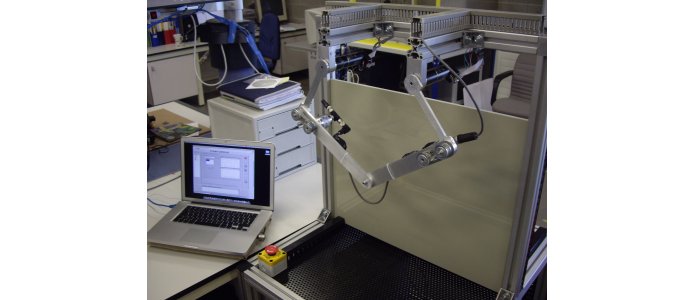
The main objective of this project is to analyse the capacity of current parallel kinematic structures as a test bench for automotives, allowing for a reduction in the cost of developing these elements and the necessary testing hours on track. For this, we will approach from several areas. First, we will look at the synthesis and design of parallel robots, in order to determine the most adequate structure to meet the needs of the application, as well as the sizing. Second, kinematic and dynamic modelling will allow...
Read more