The Project
-
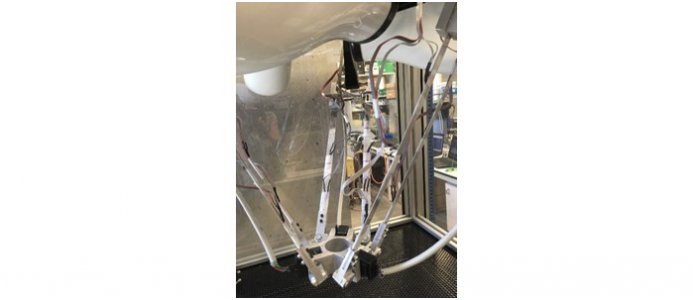
Real flexible Delta Robot prototype
-
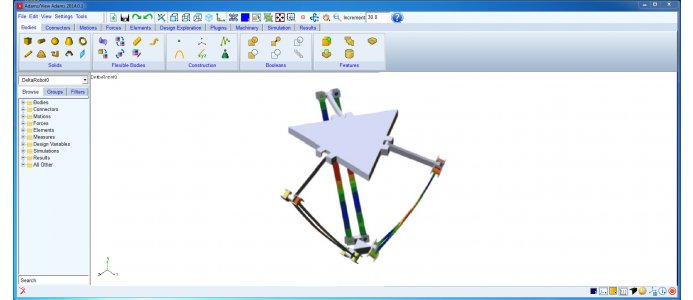
Dynamic simulation of a Delta Robot with Flexible links
-

Mechanical design prototype 3PRS
-
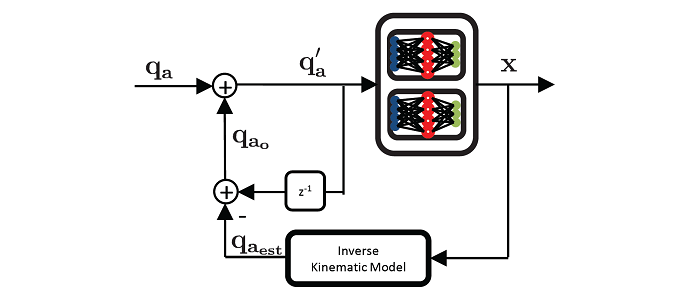
Reduced kinematic modelling
-

Implementation framework
Real-time position-strengh control based on elastic models for high performance applications of parallel robots. Control de posición-fuerza en tiempo real basados en modelos elásticos para aplicaciones de alto rendimiento de los robots paralelos (DPI2012-32882)
- Lead Researchers: Itziar Cabanes Axpe - (01/01/2013 - 31/12/2016)
- Research Area: Collaborative and intelligent Robotics
- Funding Body: Spanish Ministry of Economy and Competitiviness
Objectives
Parallel robots have proven to be the best alternative for dynamic high performance applications in which we need to manipulate powerful changes, apply controlled forces efficiently or move objects at high speed. For this, we require a correct mechanical design as well as an adequate controller that can be executed on real-time. Thus, the aim of the project is to develop specific control techniques for parallel robots in high dynamic performance applications.
Achievements
This project is currently ongoing. Achievements so far are:
- Extension of the dynamic modelling methodology (established during the previous project with Reference number: DPI2009-07669) in order to methodologically obtain the dynamic model that considers the elasticity of the elements of a parallel robot as compact, structured and manageable. This allows us to determine the deformations suffered by elements of the robots in those high dynamic performance applications.
- Reduction of the computational cost of the dynamic model with neural networks, so that it can be implemented in a real-time control loop.
- New control strategies based on non-lineal decoupling and robust techniques, specific for parallel robots in high dynamic performance applications.
- Construction of the prototype 3PRS, where we will validate, along with the Delta Robot, the elastodynamic models obtained and we will implement the control strategies that are appropriate for the application of the high dynamic performance defined.
Acknowledgements
Spanish Ministry of Economy and Competitiveness (MINECO) & FEDER
Software
Ongoing development